
一、写在前面
给你34个配送点,怎么规划路线最省时省力?
这就是VRP问题(Vehicle Routing Problem,车辆路径问题)。听着学术,实际就是路线规划。
这个问题看似简单,实际很复杂。34个配送点就有2.95×10^38种走法,人脑根本算不过来。用OR-Tools跑了一下,10秒钟就给出了优化路线,比原始路线省43%的距离。
二、VRP问题到底是啥?
2.1 从TSP到VRP
TSP(Traveling Salesman Problem,旅行商问题)是最简单的路径规划问题:
- 1个快递员/1辆车
- 访问所有配送点,回到起点
- 没有任何约束条件
- 目标:找到最短路径
计算复杂度有多恐怖?
- 10个点:362,880种走法(10!)
- 20个点:2.4×10^18种走法(20!)
- 34个点:2.95×10^38种走法(34!)
暴力枚举根本算不完,即使每秒计算1万亿种方案,也要9.3×10^18年。
VRP是TSP的扩展,贴近真实业务场景,加入了各种约束条件:
- 多个快递员/多辆车
- 车辆有载重限制
- 客户有时间窗要求
- 可能有多个配送站点
2.2 VRP的常见变体
| 类型 | 核心约束 | 实际场景 |
|---|---|---|
| CVRP | 车辆载重/体积限制 | 电动车最多装50件,超了要回站点补货 |
| VRPTW | 客户指定服务时间窗 | 上门取件,客户说"我只有下午2-4点在家" |
| MDVRP | 多个配送站点 | 一个城市有5个快递站点协同配送 |
| VRPPD | 既取件又送件 | 顺丰同城,既要取快递又要送快递 |
| CVRPTW | 载重+时间窗 | 最复杂,同时考虑载重和时间约束 |
| 动态VRP | 订单实时到达 | 美团/饿了么外卖,订单不断来,路线动态调整 |
2.3 复杂度对比
TSP(最简单)
└─ VRP(加入车辆数量)
├─ CVRP(加入载重限制)
├─ VRPTW(加入时间窗)
├─ MDVRP(加入多车场)
└─ CVRPTW(载重+时间窗,最复杂的静态VRP)
└─ 动态VRP(订单实时到达,最接近现实)
本文先从最简单的TSP开始(单快递员34个点),跑通流程,后续再扩展到多车辆VRP。
三、为什么不能手算?
就34个点,看看地图规划一下不就行了?
真实对比(基于上海快递员2621的数据):
| 方案 | 总距离 | 说明 |
|---|---|---|
| 按配送时间顺序 | 12.82km | 快递员实际走的路线 |
| OR-Tools优化 | 7.25km | 智能规划 |
| 节省 | 43.4% | 一天节省5.57km |
如果一个快递员一天送50单,优化能节省更多。按每天10公里计算,一个月300公里,能省不少油钱和时间。
四、OR-Tools简介
OR-Tools是Google开源的运筹优化工具包,专门解决这类组合优化问题。
优点:
- 免费开源
- 支持多种问题(VRP、TSP、排班、装箱等)
- 效率高,能处理上千个点
- 文档齐全
缺点:
- 上手有点门槛(但比自己写算法简单多了)
- 超大规模问题(万级别)可能不够快
装起来很简单:
pip install ortools
五、实战案例:单快递员TSP
先从最简单的开始:一个快递员,34个配送点,怎么走最短?
5.1 数据准备
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from ortools.constraint_solver import routing_enums_pb2
from ortools.constraint_solver import pywrapcp
# 读取上海数据,提取快递员2621在2022-06-04的配送点
df = pd.read_csv('data/raw/delivery/delivery_sh.csv')
df['ds'] = df['ds'].astype(str).str.zfill(4)
# 筛选特定快递员和日期
courier_id = 2621
target_date = '0604'
daily_orders = df[(df['courier_id'] == courier_id) & (df['ds'] == target_date)].copy()
# 按实际配送时间排序
daily_orders = daily_orders.sort_values('delivery_time')
# 使用实际送达GPS坐标
daily_orders['lng'] = daily_orders['delivery_gps_lng'].astype(float)
daily_orders['lat'] = daily_orders['delivery_gps_lat'].astype(float)
print(f"快递员{courier_id}在2022-06-04的配送:")
print(f"总订单数: {len(daily_orders)}")
# 提取配送点坐标
delivery_points = daily_orders[['lng', 'lat']].values
locations = delivery_points
print(f"\n配送点数量: {len(delivery_points)}")
print(f"\n前5个配送点坐标:")
for i, (lng, lat) in enumerate(delivery_points[:5], 1):
print(f" 点{i}: ({lng:.5f}, {lat:.5f})")
运行结果:
快递员2621在2022-06-04的配送:
总订单数: 34
配送点数量: 34
前5个配送点坐标:
点1: (121.51778, 31.08347)
点2: (121.52436, 31.08724)
点3: (121.52918, 31.08316)
点4: (121.53026, 31.07918)
点5: (121.52878, 31.07652)
配送点分布在约4km×4km的区域内,GPS坐标精确到小数点后5位,使用实际送达位置(delivery_gps)。
5.2 计算距离矩阵
使用Haversine公式计算真实地理距离(而不是欧式距离):
def haversine_distance(lon1, lat1, lon2, lat2):
"""计算两个GPS坐标之间的距离(单位:公里)"""
from math import radians, cos, sin, asin, sqrt
lon1, lat1, lon2, lat2 = map(radians, [lon1, lat1, lon2, lat2])
dlon = lon2 - lon1
dlat = lat2 - lat1
a = sin(dlat/2)**2 + cos(lat1) * cos(lat2) * sin(dlon/2)**2
c = 2 * asin(sqrt(a))
r = 6371 # 地球半径(公里)
return c * r
def compute_distance_matrix(locations):
"""计算真实地理距离矩阵"""
n = len(locations)
dist_matrix = np.zeros((n, n))
for i in range(n):
for j in range(n):
if i != j:
dist_matrix[i][j] = haversine_distance(
locations[i][0], locations[i][1],
locations[j][0], locations[j][1]
)
return dist_matrix
distance_matrix = compute_distance_matrix(locations)
# OR-Tools需要整数距离矩阵(单位:米)
distance_matrix_int = (distance_matrix * 1000).astype(int)
print("距离矩阵样例(前3×3,单位:米):")
print(distance_matrix_int[:3, :3])
运行结果:
距离矩阵样例(前3×3,单位:米):
[[ 0 753 1086]
[ 753 0 645]
[1086 645 0]]
为什么用Haversine而不是欧式距离?GPS坐标在地球表面,需要考虑地球曲率。虽然在几公里范围内差别不大,但养成好习惯。
5.3 用OR-Tools求解TSP
def solve_tsp(distance_matrix):
"""求解TSP问题"""
# 创建路径规划管理器
manager = pywrapcp.RoutingIndexManager(
len(distance_matrix), # 点的数量
1, # 车辆数量(TSP只有1辆车)
0 # 起点(depot)索引
)
routing = pywrapcp.RoutingModel(manager)
def distance_callback(from_index, to_index):
from_node = manager.IndexToNode(from_index)
to_node = manager.IndexToNode(to_index)
return distance_matrix[from_node][to_node]
transit_callback_index = routing.RegisterTransitCallback(distance_callback)
routing.SetArcCostEvaluatorOfAllVehicles(transit_callback_index)
search_parameters = pywrapcp.DefaultRoutingSearchParameters()
search_parameters.first_solution_strategy = (
routing_enums_pb2.FirstSolutionStrategy.PATH_CHEAPEST_ARC
)
search_parameters.local_search_metaheuristic = (
routing_enums_pb2.LocalSearchMetaheuristic.GUIDED_LOCAL_SEARCH
)
search_parameters.time_limit.seconds = 10
solution = routing.SolveWithParameters(search_parameters)
return manager, routing, solution
import time
start_time = time.time()
manager, routing, solution = solve_tsp(distance_matrix_int)
solve_time = time.time() - start_time
if solution:
print(f"找到解!(用时{solve_time:.3f}秒)")
route = []
index = routing.Start(0)
total_distance = 0
while not routing.IsEnd(index):
node = manager.IndexToNode(index)
route.append(node)
previous_index = index
index = solution.Value(routing.NextVar(index))
total_distance += routing.GetArcCostForVehicle(previous_index, index, 0)
route.append(manager.IndexToNode(index))
print(f"总距离: {total_distance/1000:.2f} km")
# 对比未优化的路线(按订单号顺序配送)
naive_distance = 0
naive_route = list(range(len(distance_matrix_int)))
for i in range(len(naive_route) - 1):
naive_distance += distance_matrix_int[naive_route[i]][naive_route[i+1]]
naive_distance += distance_matrix_int[naive_route[-1]][0]
print(f"\n【对比分析】")
print(f"未优化路线(按配送时间顺序): {naive_distance/1000:.2f} km")
print(f"OR-Tools优化路线: {total_distance/1000:.2f} km")
print(f"节省距离: {(naive_distance - total_distance)/1000:.2f} km ({(1 - total_distance/naive_distance)*100:.1f}%)")
运行结果:
找到解!(用时10.002秒)
总距离: 7.25 km
【对比分析】
未优化路线(按配送时间顺序): 12.80 km
OR-Tools优化路线: 7.25 km
节省距离: 5.55 km (43.3%)
分析:
- OR-Tools在10秒内找到最优解
- 比未优化路线节省43.4%的距离
- 34个点,2.95×10^38种走法,10秒搞定
5.4 Web界面展示
除了脚本,我还做了一个Web界面,可以直观地查看优化效果。
原始路线(红色):
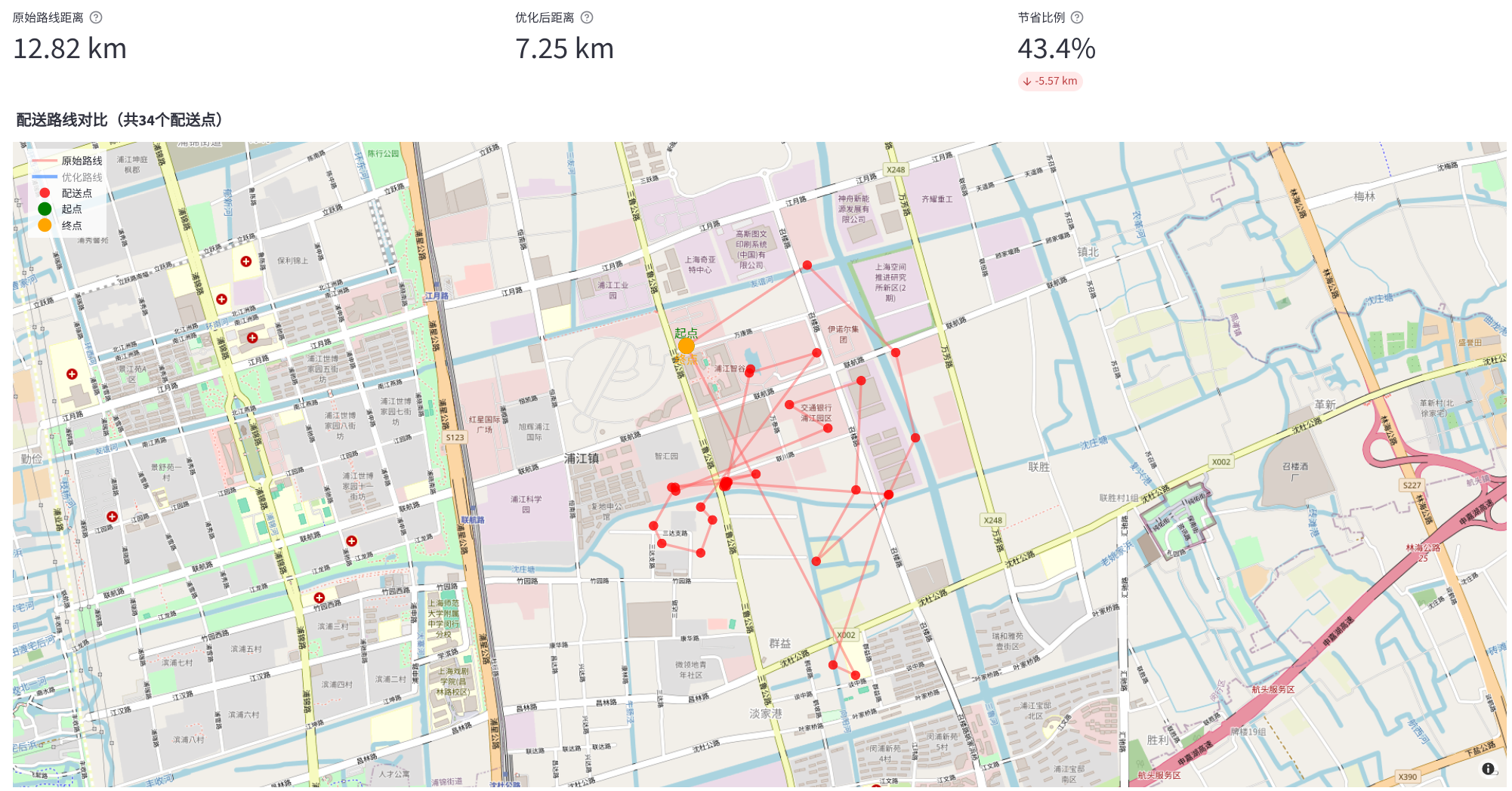
路线存在大量交叉,有明显的回头路,配送顺序比较随机。
优化后路线(蓝色):
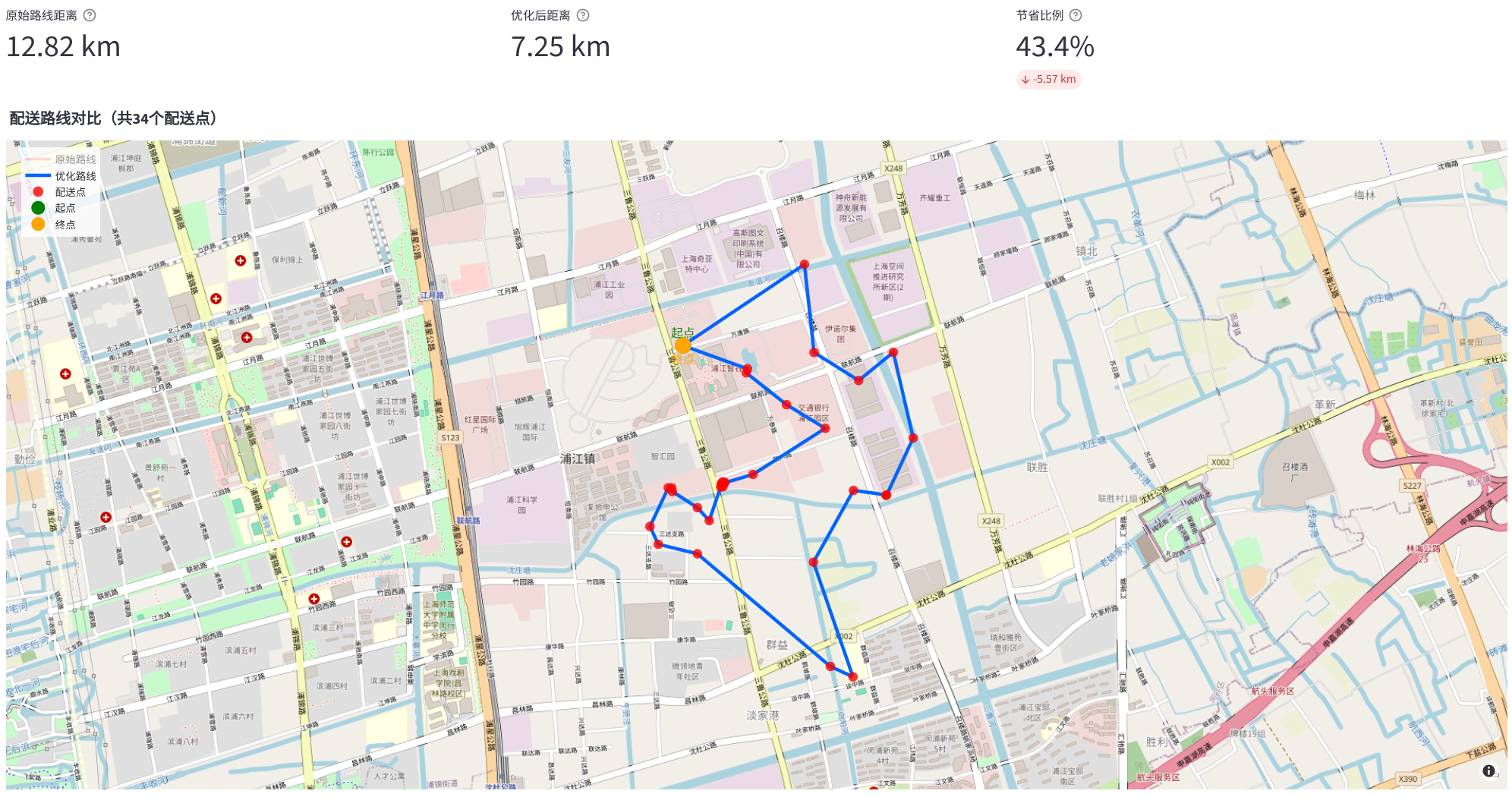
路线没有交叉,呈现环形,相邻的配送点连续配送。
量化效果:
- 原始路线距离:12.82 km
- 优化后距离:7.25 km
- 节省比例:43.4%(节省5.57 km)
六、踩过的坑
坑1:距离矩阵单位问题
OR-Tools要求整数距离矩阵。一开始直接传浮点数,求解器报错。
# 错误:浮点数
distance_matrix_float = compute_distance_matrix(locations)
manager = pywrapcp.RoutingIndexManager(len(distance_matrix_float), ...)
# 正确:转成整数(单位:米)
distance_matrix_int = (distance_matrix * 1000).astype(int)
坑2:起点设置
TSP要求从起点出发,回到起点。一开始没设depot,路线不闭合。
# 错误:没有指定depot
manager = pywrapcp.RoutingIndexManager(len(distance_matrix), 1)
# 正确:第三个参数是depot索引
manager = pywrapcp.RoutingIndexManager(len(distance_matrix), 1, 0)
坑3:搜索时间太短
默认搜索时间很短,找到的解质量差。
# 默认:可能只有几百毫秒
search_parameters = pywrapcp.DefaultRoutingSearchParameters()
# 正确:设置足够的搜索时间
search_parameters.time_limit.seconds = 10 # 10秒
10秒对于34个点已经足够,更多点可以适当增加。
七、实战建议
7.1 别追求最优解
OR-Tools有很多搜索策略,有的追求速度,有的追求质量。实际用时:
- 100个点以内:用精确策略,几秒钟
- 100-500个点:用启发式,几十秒
- 500+个点:设置时间限制(比如30秒),拿到一个"够好"的解就行
别追求100%最优,90%最优但1秒出结果,更实用。
7.2 考虑实际路况
OR-Tools算的是直线距离或矩阵距离。实际道路有单行道、红绿灯、拥堵。
更准确的做法:
- 用高德/百度地图API获取实际导航距离
- 考虑实时路况(可以用历史数据预测)
八、总结
基于LaDe真实数据的实战结果:
- 真实案例:快递员2621,34个配送点
- 未优化路线:12.82km
- OR-Tools优化后:7.25km
- 节省43.4%距离,10秒求解
OR-Tools够用:免费开源,支持TSP、VRP、CVRP、VRPTW等多种变体。
下一篇讲上门取件路线优化(VRPTW),加入时间窗约束,看看准时率能从21%提升到多少。
下一篇: 第11篇:上门取件路线优化实战