
这两年AI和机器人挺火的,发展速度也很快,我觉得未来的时代是人工智能时代,最有想象空间的技术就是AI和机器人了,我们这批技术人站在了这个时代的最前面,能做些什么呢?我做了很多思考,有了一个构想。
一、项目背景
1.1 行业现状
我国快递行业年业务量已超过千亿件,快递驿站作为"最后一公里"配送的核心节点,数量超过数十万家,承接了大量包裹的收件与暂存。然而,绝大多数驿站至今仍依赖人工完成收件、扫码、上架全流程,面临以下问题:
- 人力成本持续攀升 :人工成本高,且招人、留人困难
- 服务时间存在空白 :夜间无人值守,包裹积压无法及时处理,用户次日才能收到通知
- 操作差错难以避免 :手工上架、人工核对,容易出现放错货架、漏发通知等问题,引发用户投诉
- 用户体验有待提升 :高峰期取件排队等待时间长,包裹错放、通知延迟等情况时有发生,满意度低
上述问题在包裹量持续增长的背景下将进一步加剧,驿站运营的自动化、智能化升级已成为行业迫切需求。
1.2 项目定位
本项目面向快递驿站 场景,研发一套全自动化智能机器人系统 ,核心目标:
- 零改造,开箱即用 :机器人直接适配驿站现有基础设施(智能快递柜或普通货架),无需任何硬件改造
- 全程无人工介入 :快递员送件后,机器人自动完成扫码、上架,无需人工参与
- 现场客服随时可用 :机器人空闲时作为现场客服,用户遇到问题,机器人手把手指导,无需拨打客服电话或等待人工
- 7×24小时不间断运营 :自动换电技术实现全天候运行,不受节假日、夜间等时间限制,持续处理包裹
1.3 核心角色
| 角色 | 行为 |
|---|---|
| 快递员 | 将包裹放入驿站收件区,后续无需任何操作 |
| 机器人 | 负责收件、扫码、上架的完整闭环;空闲时作为现场客服,解答用户问题并提供引导 |
| 用户 | 凭取件码/二维码自助取件(智能柜或货架);遇到问题可直接向机器人咨询 |
| 运营方 | 通过云端管理后台远程监控,无需驻场 |
二、设计原则
有句话令我印象深刻,“科技不应该是高高在上的,而是应该服务于人民 ”,所以我期望做一款产品,不追求高大上和炫酷、而是能实实在在的解决用户问题,让每个人都能用的起。
在正式设计前,需要明确原则、定下基调,后续所有设计都要围绕这些点展开。
原则一:价格亲民
产品再好,如果价格高达几十万,对于大多数驿站老板来说都难以接受。
设计约束:
- 优先选用成熟、低成本的硬件方案
- 避免过度设计和不必要的功能堆砌
- 通过软件算法优化弥补硬件性能不足
原则二:极简设计
越复杂的设计、越复杂的机械结构,不仅容易出故障,技术难度、制造成本和维护成本也会大幅提升。
设计约束:
- 机械结构能简则简,活动部件越少越好
- 软件架构清晰分层,避免模块耦合
- 每个功能都要问:这是必需的吗?能否用更简单的方式实现?
原则三:零改造
不用贴二维码、不用改地面、不用改货架或快递柜,机器人直接进驻站就能开始工作。
设计约束:
- 货架/快递柜:直接识别现有编号标签,不用贴新标识
- 地面/墙面:不用铺导航线、不用贴二维码或反光板
- 基础设施:无需改造网络、电力等,适配驿站现有条件
三、项目价值
3.1 对驿站的价值
| 痛点 | 机器人解决方案 | 价值体现 |
|---|---|---|
| 每天弯腰几百上千次,手磨破、腰累坏 | 全流程自动化,收件、扫码、上架无需人工干预 | 身体解放,避免职业病 |
| 重复性工作日复一日,心理疲倦 | 机器人不知疲倦,7×24小时运转 | 心理减负,有时间经营商业和生活 |
| 雇人贵:一人月薪5000,一年6万,五年30万 | 一个机器人价格亲民,快速回本 | 大幅降低人力成本 |
| 招人难、管人烦 | 机器人任劳任怨,无需管理 | 省心省力 |
| 人工易出错,放错货架导致用户取件难 | 视觉精准定位,准确率高 | 减少投诉,提升用户满意度 |
| 节假日、夜间无人值守,包裹积压 | 自动换电技术实现全天候运营 | 无服务空白期,包裹及时处理 |
降本增效、家庭增收等多方面都有提升,通过技术使驿站老板过上每天喝茶看报纸的生活,这是真正能解决实际问题的刚需级生产力工具。
3.2 对公司的价值
竞争优势:
- 零改造、开箱即用 :无需驿站改造基础设施,部署门槛低,市场接受度高
- 成本可控 :价格亲民,驿站老板能快速回本,加速市场渗透
- 技术护城河 :端云协同 + 机群学习,部署规模越大,系统能力越强,形成数据飞轮效应
四、业务目标
4.1 收件入库(快递员送件)
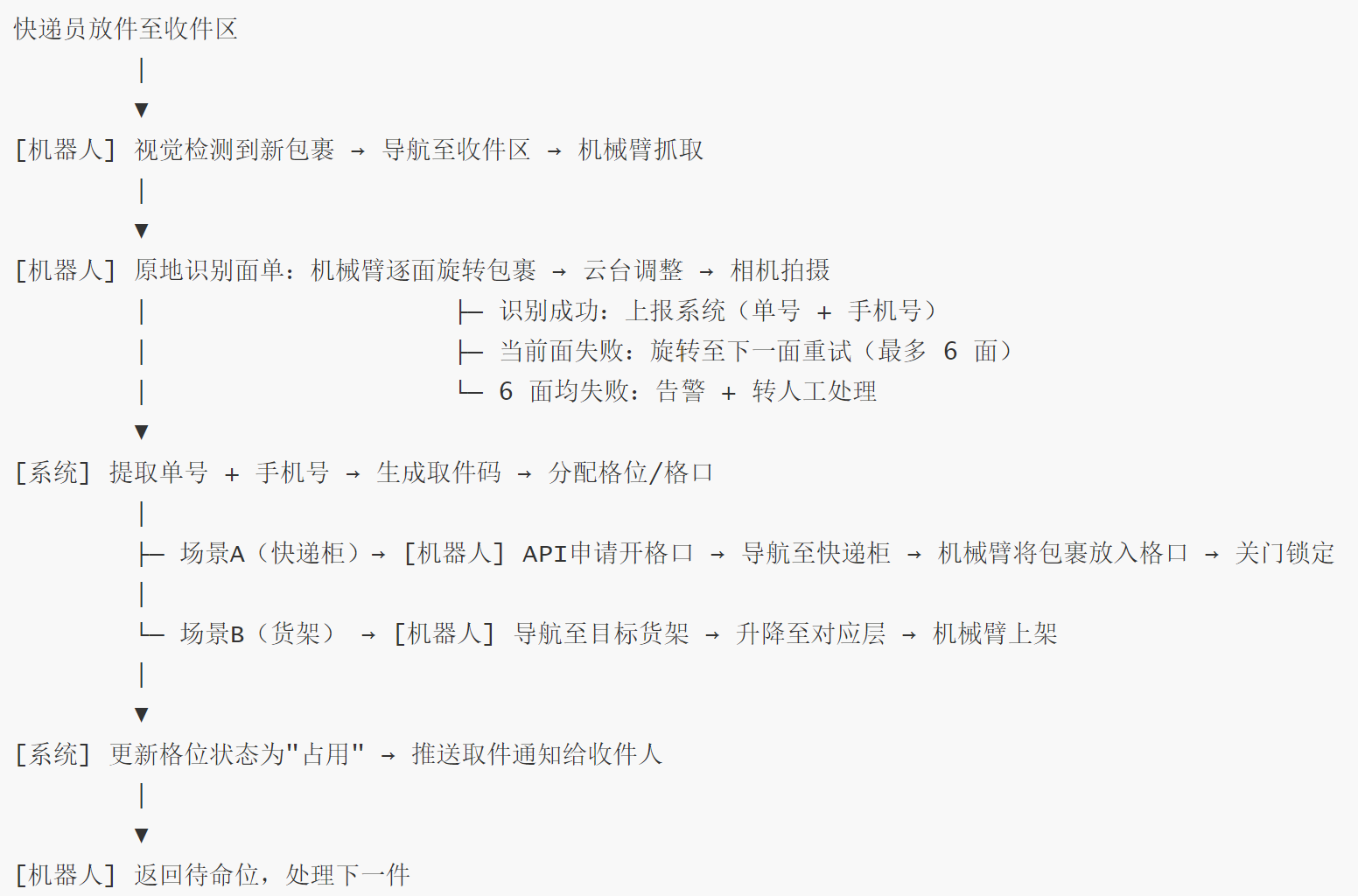
快递员将包裹放入收件区后,机器人全自动完成:
- 视觉检测收件区有新包裹,机器人移动至收件区
- 机械臂抓取包裹,云台调整角度,相机识别面单
- 驿站系统提取快递信息,生成唯一取货码并分配格位
- 机器人导航至目标货架/快递柜,机械臂精准上架/入柜
- 驿站系统推送取件通知(取件码)给收件人
- 机器人返回待命,继续处理下一件
全程 0 人工
4.2 用户自主取件
- 智能柜场景 :用户在柜机终端输入取件码,对应格口自动弹开取件
- 货架场景 :用户按通知中的格位信息,自行前往货架取件
机器人不参与取件环节,专注收件入库,最大化吞吐量。
五、系统设计方案
5.1 系统架构
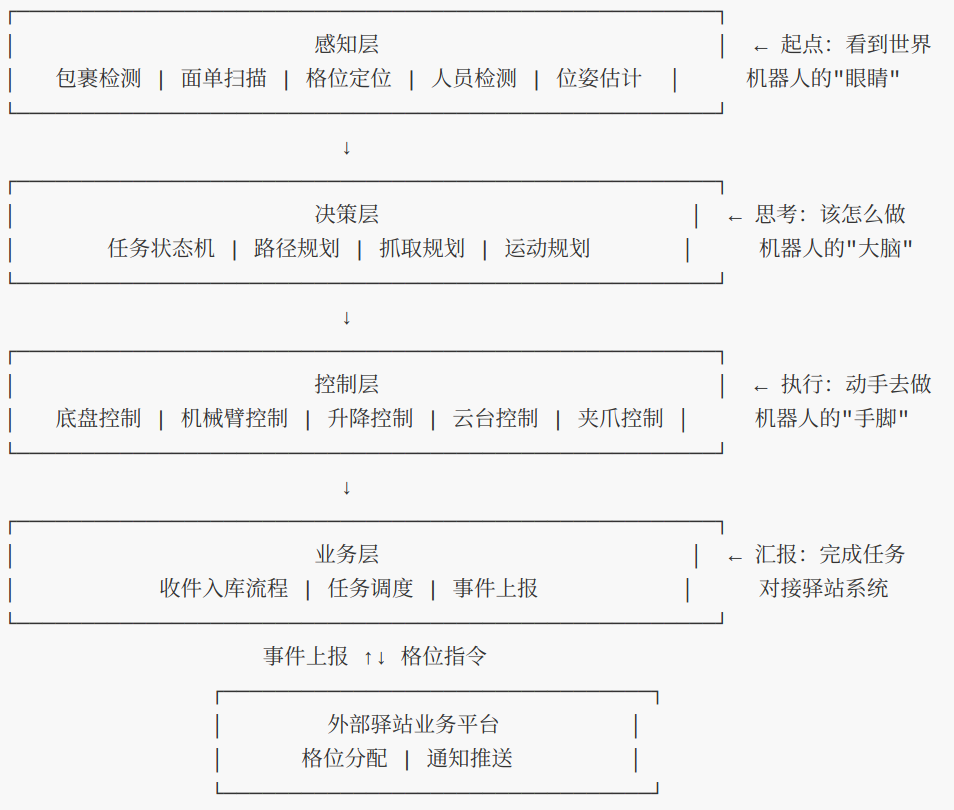
各层职责说明
| 层级 | 比喻 | 职责 |
|---|---|---|
| 感知层 | 机器人的"眼睛" | 通过视觉处理获取环境信息:检测包裹、识别面单、定位格位、感知人员 |
| 决策层 | 机器人的"大脑" | 根据感知结果做出决策:规划行走路径、计算抓取点、生成运动轨迹 |
| 控制层 | 机器人的"手脚" | 直接驱动各硬件执行:底盘移动、机械臂动作、升降对层、云台转向、夹爪开合 |
| 业务层 | 对接驿站系统 | 定义完整的收件入库业务流程,负责任务调度与对外事件上报 |
工作流程示例 :机器人看到收件区有新包裹(感知层)→ 规划抓取路径(决策层)→ 驱动机械臂抓取并搬运(控制层)→ 上报"入库完成"事件(业务层)→ 外部系统推送取件通知给用户。
技术栈 :基于 ROS2开发,复用成熟的导航、视觉、机械臂控制组件。
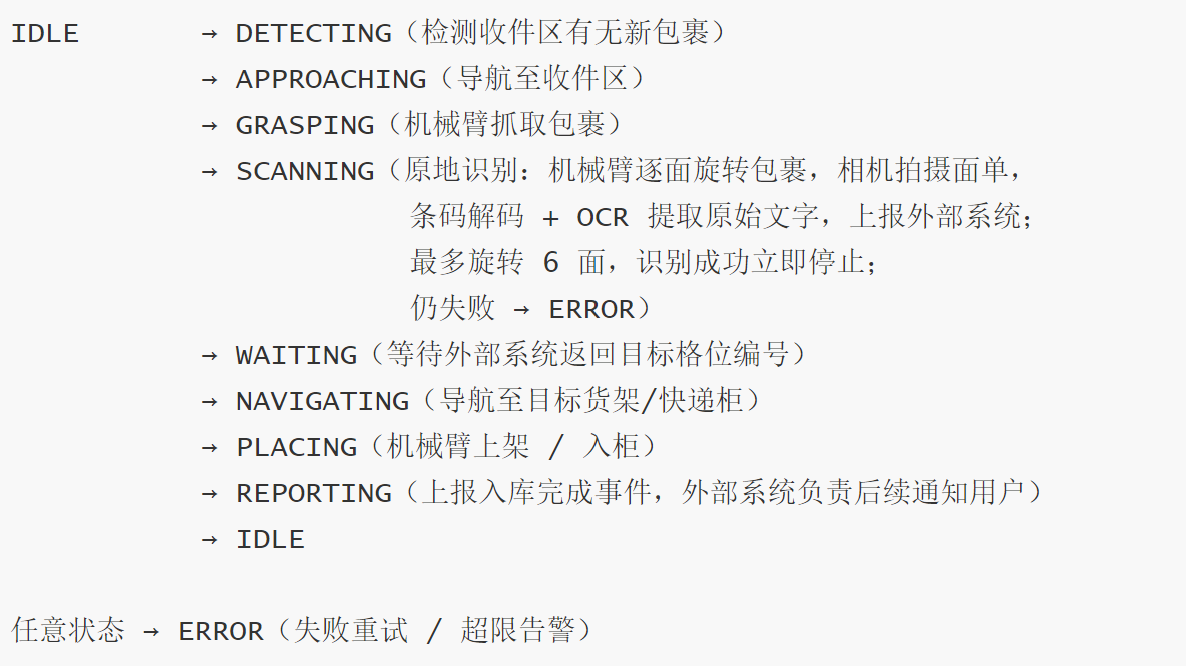
5.2 任务状态机
5.3 视觉模块
视觉模块是机器人的"眼睛",负责感知周边环境与包裹信息,驱动后续所有动作。所有视觉处理均在机器人本地实时完成。
| 功能 | 技术方案 | 说明 |
|---|---|---|
| 包裹检测 | YOLOv8 + TensorRT | 检测收件区包裹位置与姿态,触发入库流程 |
| 面单扫描 | 条码/二维码解码 + OCR | 识别面单上的单号、电话等信息,补光灯确保暗光识别 |
| 主动视觉 | 云台跟踪目标 | 面单扫描时云台旋转寻找最佳识别角度 |
| 3D 位姿估计 | RGB 检测框 + 深度点云 | 计算包裹抓取点坐标 |
| 货架格位定位 | OCR 识别现有编号 + 深度点云 | 复用货架已有编号标签,深度相机采集三维坐标完成精准对位,无需额外贴任何标记 |
| 快递柜格口定位 | OCR 识别柜门编号 + 深度点云 | 复用柜门已有编号,深度相机精准对位格口,引导机械臂放入 |
| 人员检测 | YOLOv8 人体检测 | 作业区检测到人员立即减速/停机 |
5.4 机械臂模块
机械臂是机器人完成包裹抓取与上架的核心执行机构,采用双臂设计,支持独立与协作两种工作模式,可适应从小信封到大纸箱的各类包裹尺寸。全程在线碰撞检测确保机械臂不与环境或自身发生碰撞;夹爪力反馈实时监测夹取力,确认抓取成功或触发重试。
抓取模式自动切换
视觉模块根据包裹的三维尺寸自动判断抓取模式,无需人工干预:
| 模式 | 触发条件 | 说明 |
|---|---|---|
| 单臂夹取 | 小件、软包、信封 | 末端夹爪直接夹取 |
| 双臂抱夹 | 大箱子、夹爪无法夹持的包裹 | 两臂从两侧合拢,内侧面整体托抱 |
双臂抱夹设计细节
- 小臂轴内侧安装硅胶垫板,增大与箱体的接触面积
- 其余臂段内侧增加防滑纹,进一步增加摩擦力,耐用无需维护
- 硅胶材质对纸箱、塑料袋、编织袋等多种包裹表面均有可靠摩擦力
抓取失败处理
夹爪力反馈未达到预期值时判定为抓取失败,自动重试最多 3 次;超限后上报告警,转人工处理。
5.5 导航模块
导航模块负责驱动机器人在驿站内自主移动,从收件区到货架/快递柜全程无需人工引导。首次部署时自动完成建图与格位登记,后续日常作业基于已有地图精准定位。
驿站零改造 :复用驿站现有货架编号,无需额外贴任何标记。
首次部署:自动建图巡航
- 机器人到达驿站后,自主绕场巡航一圈,全程无需人工干预:
- 深度相机边走边扫,SLAM 实时生成驿站环境地图,墙壁、通道、障碍物自动记录
- 巡航同时运行视觉识别,OCR 读取货架/智能柜上已有的编号标签(如"A区3层05"),识别并登记每个格位的 ID
- 深度相机同步采集各格位的三维坐标,与格位 ID 绑定,自动生成格位坐标表(格位编号 → 物理坐标)
- 巡航完成后地图和格位坐标表保存,后续作业直接使用,无需重复建图
日常作业:精准定位
- 基于已有地图持续定位(AMCL),计算到目标格位的最优路径直接导航
- 到达格位附近后,深度相机对格位做精细点云分析,完成最终精准对位
- 导航定位漂移时,以货架结构特征辅助重定位
5.6 升降模块
驿站货架通常有多层,机器人需要在 0~2 m 的高度范围内完成上架操作。升降模块负责驱动机械臂整体升降,使其能够精准对准不同层高的格位,是多层货架作业的基础能力。
方案选型对比
| 方案 | 优点 | 缺点 | 结论 |
|---|---|---|---|
| 剪叉升降台 | 承载力强 | 结构复杂,活动部件多,故障率高 | 不选 |
| 垂直滑轨 | 运动精度高 | 导轨外露,占用空间,不适合驿站狭小环境 | 不选 |
| 升降柱 | 收缩后体积小巧,伸展灵活,外观整洁 | 承载需满足机械臂重量要求 | 选用 |
选型结论:升降柱 + 伸缩护套
驿站空间有限,机器人需兼顾紧凑性与灵活性。升降柱平时收缩至最低位,整机体积小,便于在货架间穿行;需要操作高层格位或智能柜上层格口时,快速伸展到位,满足 0~2 m 的作业高度覆盖要求。
升降柱采用两节设计,配套伸缩护套:
- 上节升降柱外套大筒,开口朝下
- 下节升降柱外套小筒,开口朝上
- 升降时大筒始终套住小筒,两筒持续重叠,无暴露缝隙,灰尘无法进入
- 走线全部布置在护套内部,外观整洁,无裸露线缆
设计约束:
升降柱伸至最大行程时,大筒与小筒的重叠长度不少于 5~8 cm,确保防尘效果不下降。
5.7 快递柜对接
需对接快递柜 API,主要接口:
| 接口 | 说明 |
|---|---|
| 开门 | 指定的格口开锁 |
| 关门 | 放包后关门锁定 |
5.8 底盘模块
方案:四轮差速底盘
- 前两轮驱动,后两轮万向轮,转弯灵活
- 相比人型双足机器人,四轮底盘技术难度低、成本低、稳定性高
- 驿站地面平整,无需爬楼梯,轮式方案完全够用
5.9 能量模块
机器人如何提高续航能力,可以采用更大容量电池,但是这样成本高昂,违反了价格亲民的原则,那么可不可以换一种思路,用价格低廉的小容量电池呢。
方案:双电池自动换电
- 机器人搭载双电池槽,正常作业时使用其中一块
- 电量低于阈值时,机器人自主前往电池仓,取出满电电池装入,将亏电电池放回充电
- 取放电池的操作逻辑与往智能柜存取快递一致,直接复用,无需额外开发
这样仅需 3 块价格低廉的小容量电池(1 块作业、1 块备用、1 块充电),即可实现 7×24 小时不间断运营
5.10 事件上报
通知系统属于驿站业务平台的现有能力,机器人不负责发送通知。机器人只在关键节点向外部系统上报事件,由外部系统决定如何通知用户。
机器人上报的事件:
| 事件 | 触发时机 | 上报内容 |
|---|---|---|
| 包裹入库完成 | 上架/入柜成功 | 单号、格位编号、入库时间 |
| 面单识别失败 | 重试超限 | 单号(如有)、失败原因、当前包裹图像 |
| 抓取失败 | 重试超限 | 失败原因、位置信息 |
上报方式:HTTP 或 MQTT,由外部系统订阅。具体通知内容、发送渠道(短信/小程序)均由外部系统管理,与机器人无关。
5.11 现场客服
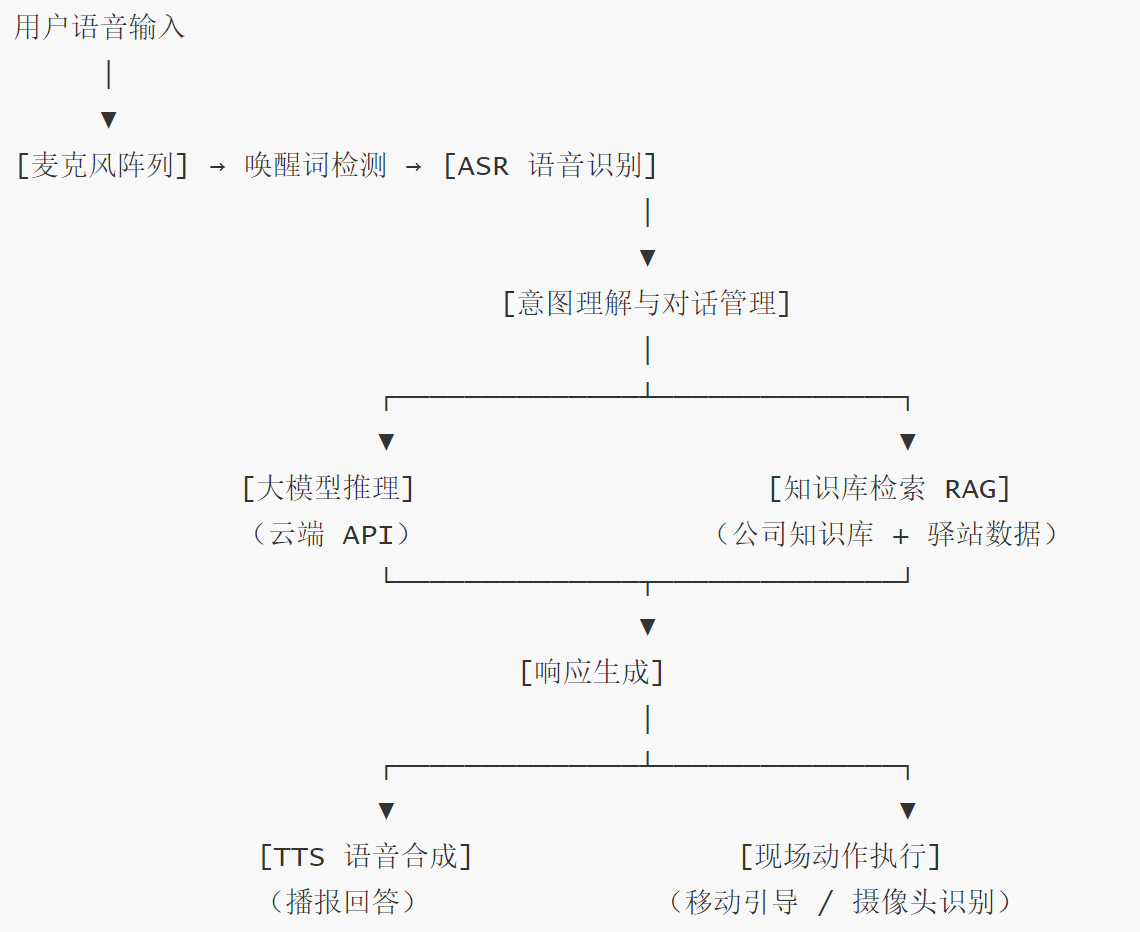
机器人在驿站空闲或低负载期间 自动切换为客服模式,通过语音与用户交互,结合云端大模型和公司知识库提供专业解答,并利用自身移动与视觉能力提供现场引导 。这是机器人区别于普通聊天机器人的核心差异——它不只是"回答问题",而是"带你去解决问题 "。
定位原则
客服是机器人的辅助能力 ,包裹处理是主业 。两者共用同一台机器人,通过任务优先级机制协调,互不干扰。
系统架构
知识库内容范围
| 知识类别 | 示例内容 |
|---|---|
| 取件流程 | 如何输入取件码、格口打不开怎么办、忘记取件码如何找回 |
| 包裹状态 | 为什么还没收到通知、预计什么时候到 |
| 驿站规则 | 存放时限、超期处理规则、损坏包裹赔偿流程 |
| 设备使用 | 快递柜操作方法、驿站营业时间 |
| 异常处理 | 包裹被错放、面单信息有误、投诉渠道 |
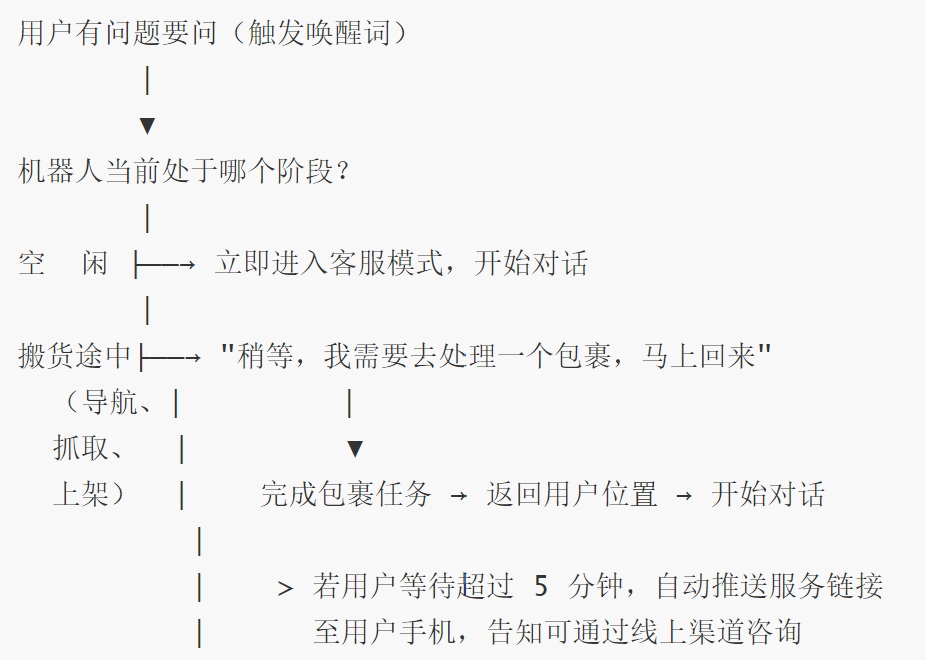
任务优先级策略
用户发起问题时,机器人根据当前所处阶段决定响应方式:
现场引导能力
语音回答之外,机器人可执行物理引导动作,这是区别于线上客服的核心优势:
| 用户问题 | 机器人行为 |
|---|---|
| "我不知道怎么取件" | 移动至用户身边,摄像头扫描用户手机取件码,确认格位后带用户走到对应位置 |
| "这个柜子怎么操作" | 移动至柜机旁,摄像头对准操作面板,语音逐步讲解操作步骤 |
| "我的包裹放哪里了" | 查询系统确认格位编号,直接导航引导用户前往 |
| "包裹好像破损了" | 摄像头拍摄包裹图像,自动上报至后台,同步告知用户处理流程 |
硬件依赖
| 硬件 | 用途 | 说明 |
|---|---|---|
| 麦克风阵列 | 唤醒词检测 + 语音采集 | 定向拾音,抑制驿站背景噪声 |
| 扬声器 | TTS 播报 | 音量自适应环境噪声 |
| 深度相机 | 用户位置识别、扫描取件码、拍摄包裹 | 复用 4.3 视觉模块能力 |
隐私与安全
- 默认不录音,仅在检测到唤醒词后激活,唤醒指示灯同步亮起,用户可见
- 对话内容不长期存储,会话结束后自动清除
- 涉及包裹信息的查询需用户报出手机号后四位进行身份核验
- 不采集人脸生物特征,摄像头仅用于包裹/格位识别
降级策略
| 异常场景 | 处理方式 |
|---|---|
| 云端大模型不可用 | 切换本地规则引擎,回答预置的常见问题 |
| 网络断开 | 语音告知用户,引导扫码进入线上客服 |
| 连续识别失败 | 主动提示用户靠近说话,3 次失败后推送线上入口 |
5.12 端云协同
机器人在驿站作业,云端负责远程监控、软件和模型的统一下发。
随着部署规模扩大,各驿站机器人在作业中积累的数据汇聚至云端,持续驱动模型迭代,再 OTA 推送回所有机器人——机群规模越大,系统能力提升越快。
运行职责划分
- 终端:实时感知、运动规划、控制执行
- 云端:远程监控、OTA 软件与模型下发、机群数据汇聚与训练
- 通信:MQTT 协议,断网时本地缓存,恢复后自动同步
驿站业务平台(格位分配、包裹记录、通知推送)属于外部系统,机器人通过事件上报与其交互(见 4.10),不在本节范围内。
机群持续学习
机器人在作业过程中持续产生高价值训练数据,云端汇聚后用于模型和算法迭代,改进后的算法 OTA 推送回各机器人,形成"数据 → 训练 → 模型下发 → 更好的数据" 良性正反馈:
| 数据来源 | 用途 |
|---|---|
| 面单识别失败案例(图像 + 失败原因) | 改进 OCR / 条码识别模型 |
| 抓取失败案例(点云 + 姿态 + 力反馈) | 改进抓取点预测模型 |
| 多驿站不同光照 / 包裹类型成功案例 | 扩充训练集多样性 |
| 格位对位偏差数据 | 改进精准定位算法 |
机群规模越大,数据多样性越高,模型迭代越快,用户在不升级硬件的前提下持续获得更强的系统能力。
实施约束 :
- 灰度发布:新模型先在仿真环境验证,再小比例机器人灰度验证,通过后全量推送
- 快速回滚:每次模型更新保留上一版本,线上异常可一键回滚
六、收件入库流程
七、适配场景说明
驿站现有设施主要有两种,机器人均可直接适配,无需改造:
7.1 场景 A:驿站已有智能快递柜
用户取件: 与现在完全一致,输入取件码 → 对应格口自动弹开 → 取走包裹。
机器人负责的部分 :
- 通过快递柜 API 申请分配空闲格口
- 机械臂将包裹放入指定格口
- 确认放入后通知柜子关门锁定
- 系统推送取件通知(含取件码)给用户
对快递柜的改造:零 。
7.2 场景 B:驿站使用普通货架
用户取件 :收到通知后,按提示前往指定格位自取。
机器人负责的部分 :
- 机械臂将包裹精准放入指定货架格位
- 系统推送取件通知,通知内容包含具体格位(如"B 区 2 层 03 号位")
- 用户到达格位后核对面单信息(收件人/手机号后四位)取走包裹
对货架的改造:零 。仅需在格位上贴编号标签(类似A1-01 格式),成本极低。
7.3 两种场景对比
| 智能快递柜 | 普通货架 | |
|---|---|---|
| 硬件改造成本 | 无 | 无 |
| 用户取件方式 | 输入取件码,格口自动弹开 | 根据通知去格位自取,核对面单 |
| 防止拿错机制 | 柜门物理隔离 | 面单信息核对 |
| 机器人对接复杂度 | 需接入柜子 API | 仅需精准上架,无需对接 |
| 适合驿站类型 | 已部署智能柜的驿站 | 使用货架的传统驿站 |
两种场景下,机器人的收件入库流程完全相同,仅上架目标(智能柜 vs 货架)和取件通知内容略有差异。
八、安全设计
| 场景 | 措施 |
|---|---|
| 作业区有人员 | 视觉检测到人立即减速,停止进入危险区域 |
| 机械臂碰撞 | 力矩传感器超阈值紧急停止,发出告警 |
| 物理急停 | 机器人本体配置急停按钮,最高优先级 |
| 夹爪夹坏包裹 | 夹取力上限控制,超限自动松开 |
| 升降失控 | 升降模块配置限位开关,防止越程 |
九、项目范围
本项目交付机器人本体及其软件系统,覆盖视觉感知、自主导航、双机械臂、升降模块、移动底盘、业务逻辑、事件上报与现场智能客服。
以下内容不在本项目范围内 ,由驿站业务平台负责:
| 不包含项 | 说明 |
|---|---|
| 取件通知推送 | 机器人上报入库事件后,短信/小程序通知由外部系统发送 |
| 格位分配与库存管理 | 外部系统决定格位,机器人按指令执行 |
| 用户账号与取件码管理 | 属于驿站业务平台能力 |
十、未来畅想
10.1、无人驿站
能全自动化作业 + 现场客服 + 7×24小时运营,我觉得可以尝试往无人驿站方向发展,但是要考虑一个问题,人有生老病死,机器也同样有生命周期,比如零件坏了怎么办。我觉得可以用两个机器人,既互为备份,又可以协作分工,比如一台专注收件入库(主业),另一台作为现场客服(辅助),或当其中一台故障或维护时,另一台接管核心业务,保证驿站持续运营等。